Un mécanisme peut être constitué de très nombreuses pièces. Il est alors laborieux de prévoir les mouvements de celles-ci. Le schéma cinématique est un outil efficace pour surmonter ce problème.
Méthode :
- On regroupe les pièces fixes les unes par rapport aux autres. Ces groupes s’appellent des classes d’équivalence. Ainsi, un mécanismes qui comprend plusieurs dizaines de pièces (ou beaucoup plus) ne comprend que quelques classes d’équivalences.
- On identifie les liaisons entre les classes d’équivalence et on les caractérise. On peut s’aider pour cela d’un tableau ou du graphe des liaisons.
- On place les liaisons (sur une feuille pour ce qui nous concerne), en respectant la position et l’orientation de chacune des liaisons. On relie les liaisons par des segments de droite, en général horizontaux ou verticaux.
Exemple
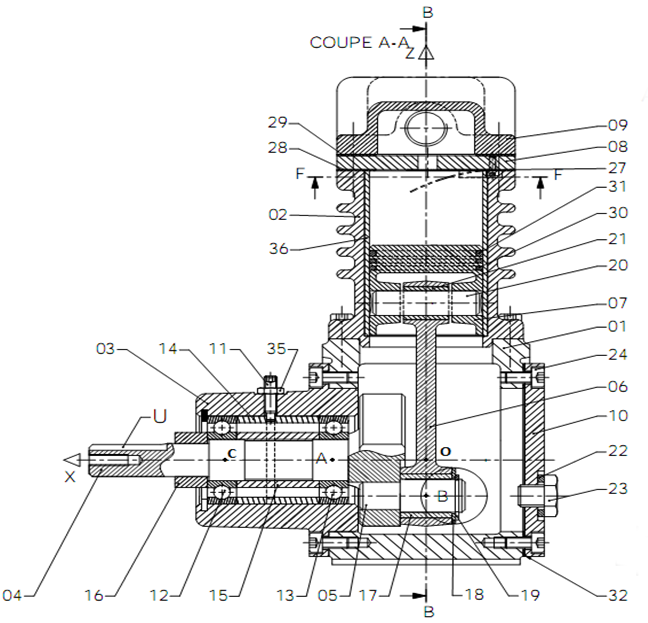
Les dessins suivants représentent un compresseur à piston permettant d’alimenter un circuit pneumatique en air comprimé. Il comporte plus de 30 pièces.
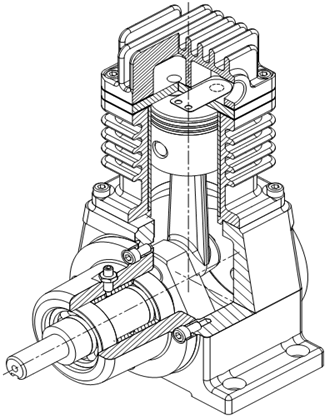
Une animation serait la bienvenue. L’animation de la vue en perspective serait très intéressante mais il faudra se contenter de la vue de face :
Classes d’équivalence
On comprend en regardant l’animation ci-dessus que ce sont des « groupes de pièces » qui se déplacent les uns par rapport aux autres. La première tâche sera donc de regrouper les pièces fixes les unes par rapport aux autres. Ces groupes de pièces sont les classes d’équivalence du mécanisme.
Si l’on analyse le dessin, on peut constater que certaines pièces sont assemblées entre elles.
Par exemple, le couvercle 10 est plaqué contre le carter 1 à l’aide des vis 24 ; le bouchon de vidange 23 est vissé sur le couvercle 10 ; le boitier de roulement 3 est assemblé avec le carter à l’aide de vis. Le cylindre 2 est également assemblé avec le carter à l’aide des vis 07 ; la culasse 08 et le couvre culasse 09 sont également assemblés avec le carter ; c’est également le cas de l’entretoise 14. En définitive les pièces {1, 2, 3, 8, 9, 10, 11, 14, 23, 24, 35, 36} sont fixes les unes par rapport aux autres. Par ailleurs ces pièces sont fixes par rapport à notre référentiel habituel – la pièce dans laquelle se trouve le compresseur, la terre. On appelle cet ensemble de pièces le bâti.
Un ensemble de pièces fixes les unes par rapport aux autres est appelé : classe d’équivalence. Cela signifie que toutes ces pièces sont équivalentes pour ce qui concerne le mouvement.
Les pièces {1, 2, 3, 8, 9, 10, 11, 14, 23, 24, 35, 36} sont fixes les unes par rapport aux autres. Elle constituent donc une classe d’équivalence. Cet ensemble de pièces s’appelle le bâti.
Les pièces {4, 5, 15, 16, 18, 19} sont fixes les unes par rapport aux autres. Elle constituent donc une classe d’équivalence. Cet ensemble de pièces s’appelle le vilebrequin.
Les pièces {6, 17, 21} sont fixes les unes par rapport aux autres. Elle constituent donc une classe d’équivalence. 6 est la bielle.
Les pièces {7, 20} sont fixes les unes par rapport aux autres. Elle constituent donc une classe d’équivalence. 7 est le piston.
Les roulements 12 et 13 sont des cas particuliers : leur bague intérieure est fixe par rapport au vilebrequin et leur bague extérieure est fixe par rapport au bâti. Leurs billes et leur cage sont mobiles par rapport à toutes les autres pièces. On ne peut donc pas les placer dans une classe d’équivalence (on pourrait placer les bagues intérieure dans la classe d’équivalence du vilebrequin et la bague extérieure dans la classe d’équivalence du bâti).
Les joints 22, 27, 28, 29 et 32 sont des éléments déformables. 30 et 31 sont des segments, il s’agit aussi d’éléments déformables. En général on néglige les éléments de ce type.
Identifiants des classes d’équivalence. – Il faut attribuer un identifiant à chaque classe d’équivalence. L’une d’entre elle, la classe d’équivalence considérée comme fixe, s’appelle le bâti. Les identifiant peuvent être des noms, des lettres, des chiffres. Si l’on utilise des chiffres, le bâti est en général identifié par le chiffre 0. Utiliser des noms pour identifier les classes d’équivalences présente l’avantage d’être « parlant » si le nom est judicieusement choisi et l’inconvénient d’occuper plus de place qu’un chiffre ou une lettre.
Liaisons
Lorsque l’on considère 2 classes d’équivalence, en faisant abstraction des autres classes d’équivalence, trois cas de figure peuvent se présenter :
- Les deux classes d’équivalence peuvent bouger librement l’une par rapport à l’autre : il n’y a pas de liaison entre ces deux classes d’équivalence.
- Les deux classes d’équivalence ne peuvent pas bouger l’une par rapport à l’autre : il y a une liaison complète entre ces deux classes d’équivalence. On peut alors réunir ces deux classe d’équivalence dans une seule classe d’équivalence.
- Seulement certains mouvements d’une classe d’équivalence par rapport à l’autre sont possibles : il y a une liaison entre ces deux classes d’équivalence
Mouvements élémentaires
Le mouvement entre deux classes d’équivalence peut être décomposé en 6 mouvements élémentaires :
- 3 translations : Tx, Ty, Tz
- 3 rotations : Rx, Ry, Rz
Lorsque ces 6 mouvements élémentaires sont possibles, il n’y a pas de liaison entre les deux classes d’équivalence.
Lorsque seulement quelques uns (ou aucun) des mouvements élémentaires sont possibles – au plus 5 – il y a une liaison entre ces deux classes d’équivalence. Les mouvements élémentaires possibles définissent cette liaison.
Cas particulier. – Lorsque aucun mouvement élémentaire n’est possible, il y a une liaison complète entre les deux classes d’équivalence. On peut alors réunir ces deux classes d’équivalence dans une seule classe d’équivalence.
Degrés de libertés
Le nombre de degrés de liberté est le nombre de mouvements élémentaires indépendants possibles.
Liaisons normalisées
10 liaisons élémentaires disposent d’un schéma normalisé (cf. tableau des liaisons) ; on peut rajouter à ces liaisons la liaison complète. Ces 11 liaisons permettent de représenter correctement la plupart des mécanismes.
Système bielle manivelle : vue de face et vue de droite
Compresseur à piston (TD)